Example: Fly QGroundControl Plan Mission
The Fly QGroundControl Plan Mission example shows how to import a QGroundControl mission plan, upload it to a vehicle, run the mission, and then command Return mode ("RTL").
Running the Example
The example is built and run in the normal way (as described here).
By default the example will load a sample plan from the plugin unit test: /plugins/mission/qgroundcontrol_sample.plan. Alternatively you can specify the plan to load when you start the example:
./fly_qgc_mission <path of QGC Mission plan>
The example terminal output should be similar to that shown below:
This is from a debug build of the SDK. A release build will omit the "Debug" messages.
$ ./fly_qgc_mission udp://:14540
Connection URL: udp://:14540
Importing mission from mission plan: ../../../plugins/mission/qgroundcontrol_sample.plan
Waiting to discover system...
[09:52:04|Info ] New device on: 127.0.0.1:14557 (udp_connection.cpp:208)
[09:52:04|Debug] New: System ID: 1 Comp ID: 1 (dronecode_sdk_impl.cpp:292)
[09:52:04|Debug] Component Autopilot added. (system_impl.cpp:339)
[09:52:04|Debug] MAVLink: info: [logger] file: rootfs/fs/microsd/log/2018-07-09/1 (system_impl.cpp:277)
[09:52:04|Debug] Found 1 component(s). (system_impl.cpp:466)
[09:52:04|Debug] Discovered 4294967298 (system_impl.cpp:468)
Discovered system with UUID: 4294967298
Waiting for system to be ready
System ready
Found 8 mission items in the given QGC plan.
Uploading mission...
[09:52:05|Debug] Send mission item 0 (mission_impl.cpp:898)
[09:52:05|Debug] Send mission item 1 (mission_impl.cpp:898)
...
[09:52:05|Debug] Send mission item 13 (mission_impl.cpp:898)
[09:52:05|Debug] Send mission item 14 (mission_impl.cpp:898)
[09:52:05|Info ] Mission accepted (mission_impl.cpp:163)
Mission uploaded.
Arming...
[09:52:05|Debug] MAVLink: info: ARMED by arm/disarm component command (system_impl.cpp:277)
Armed.
Starting mission.
Started mission.
[09:52:06|Debug] MAVLink: info: Executing Mission (system_impl.cpp:277)
[09:52:06|Debug] MAVLink: info: Takeoff to 10.0 meters above home. (system_impl.cpp:277)
[09:52:06|Debug] MAVLink: info: Takeoff detected (system_impl.cpp:277)
Mission status update: Mission status update: 1 / 8
1 / 8
Mission status update: Mission status update: 11 / 8 / 8
Mission status update: 1 / 8
Mission status update: 2 / 8
...
Mission status update: 2 / 8
Mission status update: 3 / 8
...
Mission status update: 3 / 8
Mission status update: 4 / 8
Mission status update: 4 / 8
Mission status update: 4 / 8
Mission status update: 5 / 8
...
Mission status update: 5 / 8
[09:52:58|Debug] MAVLink: critical: MANUAL CONTROL LOST (at t=75098ms) (system_impl.cpp:277)
[09:52:58|Debug] MAVLink: info: MANUAL CONTROL REGAINED after 519ms (system_impl.cpp:277)
Mission status update: 5 / 8
Mission status update: 6 / 8
...
Mission status update: 6 / 8
Mission status update: 7 / 8
..
Mission status update: 7 / 8
[09:53:06|Debug] MAVLink: info: Mission finished, loitering. (system_impl.cpp:277)
Mission status update: 8 / 8
Commanding RTL...
Commanded RTL.
How it works
The example application performs the following operations:
- Imports QGC mission items from .plan file.
- Uploads mission items to vehicle.
- Sets up mission progress monitoring.
- Starts the mission from the first mission item.
- Commands the Return/RTL action once the mission completes.
The specific code for importing missions is discussed in the guide: Missions > Import a Mission from a QGC Plan.
Source code
The full source code for the example can be found on Github here.
cmake_minimum_required(VERSION 2.8.12)
project(fly_qgc_mission)
if(NOT MSVC)
add_definitions("-std=c++11 -Wall -Wextra -Werror")
else()
add_definitions("-std=c++11 -WX -W2")
endif()
find_package(MAVSDK REQUIRED)
add_executable(fly_qgc_mission
fly_qgc_mission.cpp
)
target_link_libraries(fly_qgc_mission
MAVSDK::mavsdk_action
MAVSDK::mavsdk_mission
MAVSDK::mavsdk_telemetry
MAVSDK::mavsdk
)
/**
* @file fly_qgc_mission.cpp
*
* @brief Demonstrates how to import mission items from QGroundControl plan,
* and fly them using the MAVSDK.
*
* Steps to run this example:
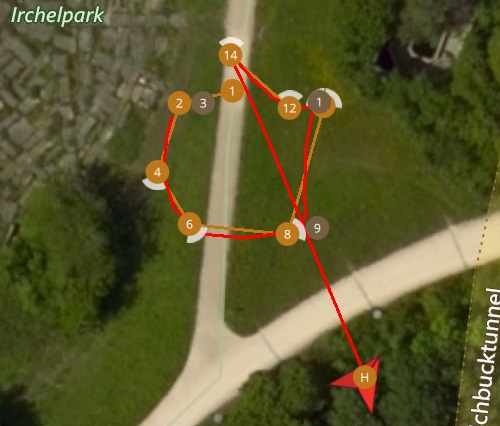
* 1. (a) Create a Mission in QGroundControl and save them to a file (.plan) (OR)
* (b) Use a pre-created sample mission plan in "plugins/mission/qgroundcontrol_sample.plan".
* Click
* [here](https://user-images.githubusercontent.com/26615772/31763673-972c5bb6-b4dc-11e7-8ff0-f8b39b6b88c3.png)
* to see what sample mission plan in QGroundControl looks like.
* 2. Run the example by passing path of the QGC mission plan as argument (By default, sample
* mission plan is imported).
*
* Example description:
* 1. Imports QGC mission items from .plan file.
* 2. Uploads mission items to vehicle.
* 3. Starts mission from first mission item.
* 4. Commands RTL once QGC Mission is accomplished.
*
* @author Shakthi Prashanth M <shakthi.prashanth.m@intel.com>,
* Julian Oes <julian@oes.ch>
* @date 2018-02-04
*/
#include <mavsdk/mavsdk.h>
#include <mavsdk/plugins/action/action.h>
#include <mavsdk/plugins/mission/mission.h>
#include <mavsdk/plugins/telemetry/telemetry.h>
#include <functional>
#include <future>
#include <iostream>
#include <memory>
#define ERROR_CONSOLE_TEXT "\033[31m" // Turn text on console red
#define TELEMETRY_CONSOLE_TEXT "\033[34m" // Turn text on console blue
#define NORMAL_CONSOLE_TEXT "\033[0m" // Restore normal console colour
using namespace mavsdk;
using namespace std::chrono; // for seconds(), milliseconds()
using namespace std::this_thread; // for sleep_for()
// Handles Action's result
inline void handle_action_err_exit(Action::Result result, const std::string &message);
// Handles Mission's result
inline void handle_mission_err_exit(Mission::Result result, const std::string &message);
// Handles Connection result
inline void handle_connection_err_exit(ConnectionResult result, const std::string &message);
void usage(std::string bin_name)
{
std::cout << NORMAL_CONSOLE_TEXT << "Usage : " << bin_name
<< " <connection_url> [path of QGC Mission plan]" << std::endl
<< "Connection URL format should be :" << std::endl
<< " For TCP : tcp://[server_host][:server_port]" << std::endl
<< " For UDP : udp://[bind_host][:bind_port]" << std::endl
<< " For Serial : serial:///path/to/serial/dev[:baudrate]" << std::endl
<< "For example, to connect to the simulator use URL: udp://:14540" << std::endl;
}
int main(int argc, char **argv)
{
Mavsdk dc;
std::string connection_url;
ConnectionResult connection_result;
// Locate path of QGC Sample plan
std::string qgc_plan = "../../../plugins/mission/qgroundcontrol_sample.plan";
if (argc != 2 && argc != 3) {
usage(argv[0]);
return 1;
}
connection_url = argv[1];
if (argc == 3) {
qgc_plan = argv[2];
}
std::cout << "Connection URL: " << connection_url << std::endl;
std::cout << "Importing mission from mission plan: " << qgc_plan << std::endl;
{
auto prom = std::make_shared<std::promise<void>>();
auto future_result = prom->get_future();
std::cout << "Waiting to discover system..." << std::endl;
dc.register_on_discover([prom](uint64_t uuid) {
std::cout << "Discovered system with UUID: " << uuid << std::endl;
prom->set_value();
});
connection_result = dc.add_any_connection(connection_url);
handle_connection_err_exit(connection_result, "Connection failed: ");
future_result.get();
}
dc.register_on_timeout([](uint64_t uuid) {
std::cout << "System with UUID timed out: " << uuid << std::endl;
std::cout << "Exiting." << std::endl;
exit(0);
});
// We don't need to specify the UUID if it's only one system anyway.
// If there were multiple, we could specify it with:
// dc.system(uint64_t uuid);
System &system = dc.system();
auto action = std::make_shared<Action>(system);
auto mission = std::make_shared<Mission>(system);
auto telemetry = std::make_shared<Telemetry>(system);
while (!telemetry->health_all_ok()) {
std::cout << "Waiting for system to be ready" << std::endl;
sleep_for(seconds(1));
}
std::cout << "System ready" << std::endl;
// Import Mission items from QGC plan
Mission::mission_items_t mission_items;
Mission::Result import_res = Mission::import_qgroundcontrol_mission(mission_items, qgc_plan);
handle_mission_err_exit(import_res, "Failed to import mission items: ");
if (mission_items.size() == 0) {
std::cerr << "No missions! Exiting..." << std::endl;
exit(EXIT_FAILURE);
}
std::cout << "Found " << mission_items.size() << " mission items in the given QGC plan."
<< std::endl;
{
std::cout << "Uploading mission..." << std::endl;
// Wrap the asynchronous upload_mission function using std::future.
auto prom = std::make_shared<std::promise<Mission::Result>>();
auto future_result = prom->get_future();
mission->upload_mission_async(mission_items,
[prom](Mission::Result result) { prom->set_value(result); });
const Mission::Result result = future_result.get();
handle_mission_err_exit(result, "Mission upload failed: ");
std::cout << "Mission uploaded." << std::endl;
}
std::cout << "Arming..." << std::endl;
const Action::Result arm_result = action->arm();
handle_action_err_exit(arm_result, "Arm failed: ");
std::cout << "Armed." << std::endl;
// Before starting the mission subscribe to the mission progress.
mission->subscribe_progress([](int current, int total) {
std::cout << "Mission status update: " << current << " / " << total << std::endl;
});
{
std::cout << "Starting mission." << std::endl;
auto prom = std::make_shared<std::promise<Mission::Result>>();
auto future_result = prom->get_future();
mission->start_mission_async([prom](Mission::Result result) {
prom->set_value(result);
std::cout << "Started mission." << std::endl;
});
const Mission::Result result = future_result.get();
handle_mission_err_exit(result, "Mission start failed: ");
}
while (!mission->mission_finished()) {
sleep_for(seconds(1));
}
// Wait for some time.
sleep_for(seconds(5));
{
// Mission complete. Command RTL to go home.
std::cout << "Commanding RTL..." << std::endl;
const Action::Result result = action->return_to_launch();
if (result != Action::Result::SUCCESS) {
std::cout << "Failed to command RTL (" << Action::result_str(result) << ")"
<< std::endl;
} else {
std::cout << "Commanded RTL." << std::endl;
}
}
return 0;
}
inline void handle_action_err_exit(Action::Result result, const std::string &message)
{
if (result != Action::Result::SUCCESS) {
std::cerr << ERROR_CONSOLE_TEXT << message << Action::result_str(result)
<< NORMAL_CONSOLE_TEXT << std::endl;
exit(EXIT_FAILURE);
}
}
inline void handle_mission_err_exit(Mission::Result result, const std::string &message)
{
if (result != Mission::Result::SUCCESS) {
std::cerr << ERROR_CONSOLE_TEXT << message << Mission::result_str(result)
<< NORMAL_CONSOLE_TEXT << std::endl;
exit(EXIT_FAILURE);
}
}
// Handles connection result
inline void handle_connection_err_exit(ConnectionResult result, const std::string &message)
{
if (result != ConnectionResult::SUCCESS) {
std::cerr << ERROR_CONSOLE_TEXT << message << connection_result_str(result)
<< NORMAL_CONSOLE_TEXT << std::endl;
exit(EXIT_FAILURE);
}
}